Hello and welcome to another Burf update, I haven’t actually thought of a title for this as until I stop and think, I am not really sure what I have done in April.
The Elephant in the room
So the last time I wrote a post, I was super excited about a show (which went super well), I had done tons of work on the Inmoov robot, and Compsoft had received some Apple Vision Pro’s. Exciting times!!!
Sadly a few personnel things were also going on, and still are. I have sadly split up with my partner which has made the last month a real struggle. I know, everyone has been there, life is about ups and downs, and at the time I thought I was doing the right thing for myself, however, I am not quite sure now. Life has been pretty tough recently, however, I am lucky that I have amazing friends and family looking out for me.
We smashed it, we could not have asked for a better show. Our stand was super popular and everyone loved our tech. We were told many times we had the most engaging stand. We got to chat with some outstanding people and make some new contacts. We are not set to do another show in May 🙂
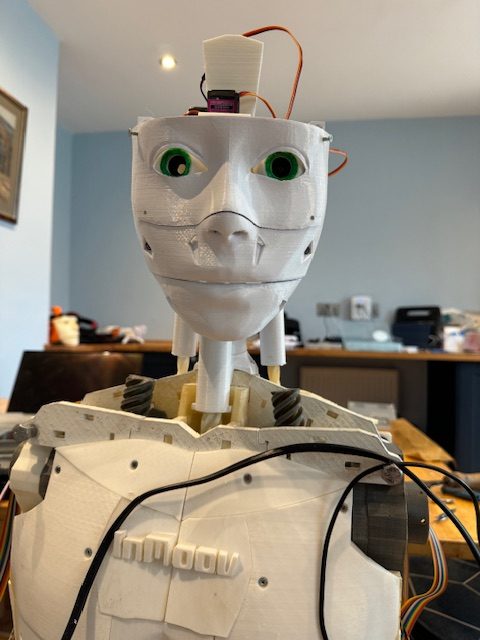
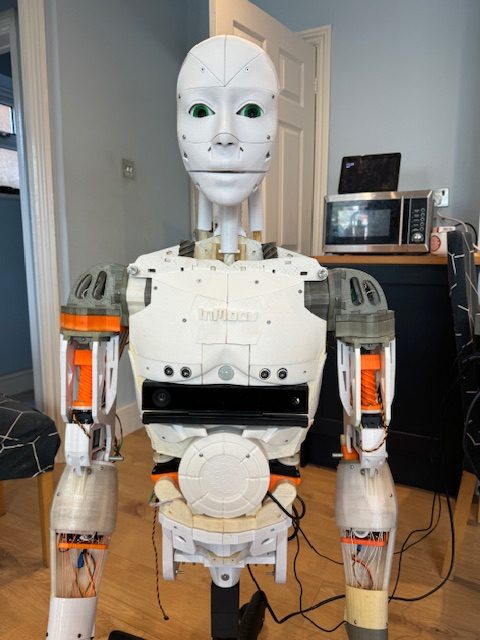
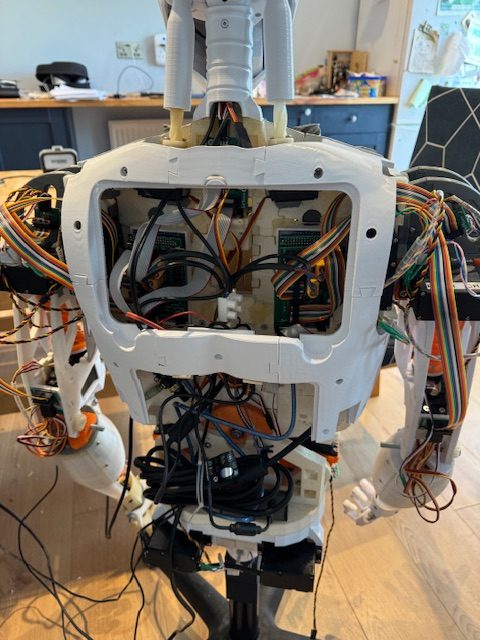
Inmoov Robot
Since the show, I haven’t done a great deal on the robot. I have replaced its neck as it was not working very well. I have printed a new arm/hand but have not had time to build it and I have sped it up for the Apple Vision Pro demo. Oh and fixed the other arm. Once I get my mojo back I hope to continue improving it.
Rover Robot / ROS2
I have started designing and building my own robot, and I have only made the briefest progress however this is something I want to achieve this year, ideally before July. I am following some rough guides on it so that I have some sort of direction. It is very similar to:
https://articulatedrobotics.xyz/tutorials/mobile-robot/project-overview/
It will run ROS2, SLAM and will have Lidar and a vision system. I hope to drive it outside remotely. This will help me learn more about robotics and ROS2.
ROS2 mentorship
As I mentioned last month I got invited into a ROS2/Robotics mentorship program however I have just not been in the right place mentally to keep up with it. Sad really but I have to be honest with myself. The classes happen at very odd times so it’s quite easy to miss them.
Brilliant App
A long-running theme of mine is to improve my Maths as I need it for Robotics, I have tried a few things out there however the one that seems to keep my brain moving (so far) is the Brilliant App, it’s really good but a little expensive. I am sure I will cave and buy it as it seems to keep me engaged.
Shed
Due to my partner and I splitting up, I had to get stuff out of her garage. This was a lot of LEGO, which is now in my new 6×9 Shed. Thanks to my dad for buying it for me for my birthday 🙂
Unity
At work, I have been looking into Unity, Spatial computing with the Apple Vision Pro, and digital twins. The plan is to try and use Unity to move a 3D model of the blue robotic arm in Mixed reality while it mimics it in real life. I have made some progress but I haven’t used Unity for years. Unity seems to have made the decision to create a new framework for the Apple Vision Pro (PolySpatial), instead of adding the device to the Mixed Reality template which supports Quest, Hololens, and Magic Leap. You also need a pro license to use it (£1800py).
Goals
I know I have a list of goals defined and I am on track to smash them however my focus at the moment is to get my brain firing up, and get the MOJO back to how I used to be at the peak of the O2 Labs / LEGO times. Those were fun times and I really was doing some epic things.